Сторінка
6
• можливість групування, сортування, відображення, аналізу об'єктів прошарками;
• виграш у швидкодії алгоритмів розпізнавання, що пов'язано з можливістю розпізнавання для невеликої частки об'єктів, які утворюють множину зацікавленості;
• виграш у швидкодії та достовірності розпізнавання внаслідок угрупування об'єктів за типами, до яких застосовуються специфічні для відповідної групи методи обробки, критерії, бази прототипів та ін.;
• векторне зображення використовує суттєво менший об'єм пам'яті ЕОМ (оперативного та дискового простору).
2.2 Технологічна послідовність автоматизованого розпізнавання об'єктів на цифрових растрових зображеннях.
Розглянемо технологічну послідовність автоматизованого розпізнавання, що пропонується при використанні існуючих растрових карт, даних ДЗЗ або аерофотозйомки (рис2.1). Вхідне растрове зображення у цифровому вигляді підлягає попередньому обробленню внаслідок наявності характерних для сканованих та аерофотозображень декількох типів завад-(адитивних, мультиплікативних, імпульсних), великих розмірів цифрових масивів даних, обмеженості апаратно-обчислювальних ресурсів, відсутності достовірної апріорної інформації про характеристики об'єктів і систему формування зображень. Для попереднього оброблення частіше застосовують алгоритми локально-апертурної фільтрації .
В процесі сепарації інформативних зон визначають області зображення, які містять корисну інформацію. Для цих зон проводиться подальше оброблення.
Продовженням попереднього оброблення вхідного растру є сегментація. Мета та алгоритми сегментації залежать від алгоритмів векторизації та розпізнавання, що мають бути застосовані до даного зображення. Найчастіше критерієм векторизації є колір (яскравість, або ін.) пікселів [5], тобто об'єктом називають зв'язану множину пікселів однакового кольору (кластер) при тому, що суміжні з цією множиною пікселі мають інші кольори. В цьому випадку сегментація - це процес формування в інформативних зонах кластерів, які відловідають реальним об'єктам. Розпізнавання може також проводитися з викорис танням скелету контурного препарату. Для цього треба провести сегментацій таким чином, щоб виділити в окремі кластери границі об'єктів.
Від якості попередніх етапів оброблення зображення залежать хід та результат автоматичної векторизації. В ідеальному випадку множина векторних об'єктів повинна співпадати з множиною реальних об'єктів на зображенні.
Усунути та скоригувати всі завади на вхідних растрах принципово неможливо, додаткових опцій при налаштовуванні методів оброблення растрів може не вистачити для правильної сегментації. В цьому випадку залишкові завади ; сприймаються системою як об'єкти або частини об'єктів та переводяться при трансформаціях у векторний формат. Тому для підготовки до кінцевого розпізнавання необхідно провести попереднє оброблення отриманого векторного зображення. Таке оброблення базується на застосуванні методів, які за тими чи іншими ознаками класифікують векторні об'єкти як завади і, таким чином, стає можливим скоригувати помилки.
Наступним кроком для підвищення ефективності кінцевого розпізнавання є преселекція та сепарація об'єктів на інформативні прошарки. Преселекція являє собою класифікацію об'єктів за їх інтегральними параметрами (периметр, площа та ін.) . На цій стадії можливо відфільтрувати, наприклад, шумові об'єкти, які мають площу менше певного порогового значення. Або за значенням площі можливо виконати сортування полігонів на будівлі (менші значення) та поля без будівель (більші значення площі). Лінії можливо сортувати за довжиною, товщиною (зберігається як властивість лінії після скелетизації), орієнтацією, кутом повороту та іншими параметрами. Значення границь інтегральних параметрів в процесі експлуатації системи постійно уточнюються, а множина цих параметрів може доповнюватися новими, більш ефективними, що надають нових можливостей при обробленні.
За отриманими прошарками формуються множини зацікавленості, в яких після геоприв'язки проводиться кінцеве розпізнавання та сортування об'єктів.
В разі необхідності геоприв'язку виконують до етапу преселекції. Кінцеве розпізнавання являє собою широкий клас моделей та методів, які останнім часом іртрімко розвиваються.
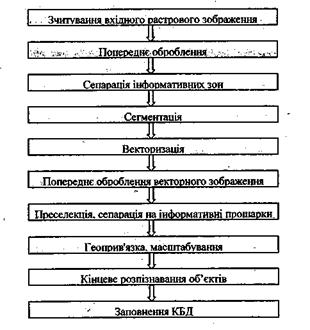
Мал. 1. Технологія автоматизованого розпізнавання об'єктів на цифрових растрових зображеннях
2.3 Реалізації методу розпізнавання
графічних образів в системі ведення земельного кадастру.
Як зазначалося, найбільш ефективне заповнення КБД при використанні існуючих карт, даних ДЗЗ або аерофотозйомки буде проводитися у разі поєднання автоматичної векторизації та розпізнавання. Але заповнення КБД може відбуватися на основі існуючих векторних цифрових карт. В цьому випадку заповнення КБД удосконалюється завдяки застосуванню автоматизованого розпізнавання графічних образів. Наявність такої можливості вимагає реалізації у вигляді окремого програмного модулю (компоненту).
Блок преселекції також повинен бути реалізований у вигляді окремого програмного модулю (компоненту). Це дозволить використовувати його для підтримки первинного заповнення КБД та для виконання швидких узагальнений просторових запитів.
При використанні дігітайзерних технологій або напівавтоматичної векторизації стає можливим зосередити зусилля операторів на введенні графічної інформації. Після цього реалізується процес заповнення КБД з розпізнаванням.
Виходячи з опису технологічної послідовності автоматизованого розпізнавання цифрових растрових зображень (мал. 1), для його реалізації необхідне, виконувати інтенсивне попереднє оброблення растрів, що у загальному випадку може складати більше часу, ніж всі наступні етапи технологічної послідовності. Але алгоритми, які працюють при попередньому обробленні растрів та сегментації, використовують системи параметрів, значення яких з успіхом застосовують при обробленні растрів аналогічного походження, а тим більше при обробленні знімків фіксованої території. Растрові етапи технологічної послідовності розпізнавання вимагають початкового налаштовування (калібрації). Після цього відкалібровані растрові алгоритми багаторазово використовуються в автоматичному режимі, що особливо корисно при оновленні КБД. Таким чином, впровадження розпізнавання графічних образів в автоматизовану систему ведення земельного кадастру передбачає використання растрів аналогічного походження та алгоритмів їх оброблення, що калібруються.