Сторінка
2
де gj — коефіцієнт, який враховує кратність виконання j-ої операції;
H — урожайність, норма внесення добрив, інші норми продукції, яка
збирається або транспортується у залежності від виконуваної
операції, т/га;
L — віддаль перевезення вантажу, км.
Знаючи Qj, можна визначити годинні обсяги робіт:

де Tj — час, який відводиться на виконання j–ої операції.
Підставивши у (1) замість Qj його значення із (2), одержимо:
Оптимальні режими роботи і годинний виробіток агрегатів на кожній із операцій визначається у відповідності з техніко-експлуатаційними показниками енергетичних засобів і сільськогосподарських машин, а також умовами їх експлуатації.
Виходячи із агротехнічно допустимого швидкісного режиму роботи машинного агрегату, фону поля, потужності двигуна та інших параметрів енергетичного засобу, дотична сила тяги за можливостями двигуна, дорівнює:

де Pk — дотична сила тяги, кН;
Nн — номінальна потужність двигуна, кВт;
hмг — коефіцієнт корисної дії трансмісії;
Vд— допустима робоча швидкість агрегату, км/год.
Для збиральних агрегатів, які обмолочують або подрібнюють продукцію, максимальна допустима робоча швидкість руху за умов оптимального завантаження машини по пропускній здатності визначається за виразом:

де qф — пропускна здатність машини, кг/с;
Bр — робоча ширина захвату машини, м;
class="form" Q — урожайність продукції, т/га.
У випадку агрегатування тягово-приводної машини, потужність двигуна, яка витрачається на тягу Nт, дорівнює:
![]()
де Nввп — потужність, яка витрачається на привід робочих органів машини, кВт.
Одержане значення Nт для даного енергетичного засобу підставляється у формулу (8) замість Nн .
У зв’язку з тим, що рушійна сила обмежується силою зчеплення ведучого апарату з грунтом, її значення можна визначити:
![]()
де Fmax — максимальна сила зчеплення ведучого апарату з грунтом, кН;
Gтр — маса енергетичного засобу, т;
g — прискорення вільного падіння, м/с2;
j — коефіцієнт, який враховує розподіл маси енергетичного засобу на ведучий апарат;
m — коефіцієнт зчеплення ведучого апарату з грунтом (табл. 13.15).
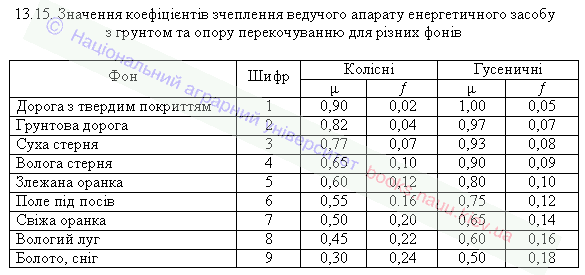
13.15. Значення коефіцієнтів зчеплення ведучого апарату енергетичного засобу з грунтом та опору перекочуванню для різних фонів
Коефіцієнт m залежить від фону і класу грунтів, на якому працює агрегат та від типу рушія. З достатньою точністю цей показник можна визначити за такими залежностями :
для енергетичних засобів з гусеничними рушіями:
![]()
для енергетичних засобів на пневматичних шинах:
![]()
де y — фон грунту на якому працює машинний агрегат;
r — клас грунту за питомим опором .
За питомим опором ( кН/м2 ) грунти поділяють на 9 класів: 1–27 .34; 2–35 .39; 3–40 .48; 4–49 .55; 5–56 .62; 63 .67; 7–68 .75; 8–76 .82; 9–83 .90.
Рушійна сила агрегату Рдв чисельно дорівнює:
- при умові, що Рк > Fmax , Рдв = Fmax ;
- при умові, що Рк <= Fmax , Рдв = Рк .
Основні сили опору руху енергетичних засобів можна визначити:
![]()
де f — коефіцієнт опору перекочування;
i — нахил місцевості, %.
Коефіцієнт опору перекочування енергетичних засобів:
з гусеничним рушієм можна визначити за формулою :
![]()
для енергетичних засобів з колісними рушіями :
![]()
Гакове зусилля, який розвиває енергетичний засіб, буде дорівнювати :
![]()
У випадку перевищення розрахункового для даних умов гакового зусилля над максимально допустимим, приймається:
![]()
де Р'кр — допустиме гакове зусилля енергетичного засобу, кН.
Залежно від призначення машини-знаряддя робочий опір, створюваний при виконанні процесу, можна визначити:
для плугів і лемішних лущильників
![]()
для звичайних тягових машин
![]()
для причіпних машин при відсутності тягового опору
![]()
для транспортних агрегатів
![]()
де R — загальний опір машини, кН;
kov — питомий опір плугів, кН/м2;
kv — питомий опір звичайних машин, кН/м2;
b — ширина захвату корпусу плуга, м;
a — глибина оранки, м;
B — конструктивна ширина захвату звичайних машин, м;
Gm — маса машини, т;
l — коефіцієнт, що враховує довантаження енергетичного засобу;
Gван — маса вантажу, що перевозиться, т.
Питомий опір машин залежить від швидкісного режиму роботи і може бути уточнений за такими емпіричними залежностями:
для плугів і лемішних лущильників
kov = ko (1 + 0.006 (Vp2 — Vo2)), кН/м2; (23)
для інших машин
kv = k (1 + Т (Vp — Vo)), кН/м, (24)
де ko — питомий опір плугів при швидкості руху до 5 км/год;
Vp — робоча швидкість агрегату, км/год;
Vo — швидкість, при якій визначено питомий опір машин у виробничих умовах, км/год (приймають Vo = 5 км/год);
k — питомий опір звичайних машин при швидкості до 5 км/год, кН/м;
Т — темп приросту питомого опору для відповідної машини.
Таким чином, знайшовши гакове зусилля енергетичного засобу, а також опір сільськогосподарської машини, можна визначити необхідну кількість машин у агрегаті.
Для багатомашинних агрегатів необхідно спочатку визначити можливу ширину захвату машинного агрегату: